一、FMB无限制机器人格斗大赛Poison
1.成员:轩辕文成、刘涛、陈远林、王明琦
2.作品简介
 Poison重13.89kg,是一台FW级的格斗机器人,它的框架采用2040钢管焊接而成,结构稳定,动力采用四台775行星减速电机驱动,由一台6s锂电池提供动力,动力强劲,输出可达1kw,主武器采用一台250w的直流大扭矩电机作为动力,带动一个1.5kg的转鼓旋转,利用高速旋转产生的惯性势能攻击对方机器人。转鼓在比赛中表现了很大的威力,可以拆掉对手的护甲和部分机架。电路部分做了EMC保护和光耦隔离电路,保证了恶劣环境下机器人的正常运行,电路部分在比赛中表现出很高的稳定性,无一次故障。 护甲采用弹性耐磨不锈钢作为反应装甲,不仅可以防护轮子受到攻击还可以利用弹性削弱攻击。 顶盖采用碳纤维板,在重量轻的同时保证了强度。
Poison重13.89kg,是一台FW级的格斗机器人,它的框架采用2040钢管焊接而成,结构稳定,动力采用四台775行星减速电机驱动,由一台6s锂电池提供动力,动力强劲,输出可达1kw,主武器采用一台250w的直流大扭矩电机作为动力,带动一个1.5kg的转鼓旋转,利用高速旋转产生的惯性势能攻击对方机器人。转鼓在比赛中表现了很大的威力,可以拆掉对手的护甲和部分机架。电路部分做了EMC保护和光耦隔离电路,保证了恶劣环境下机器人的正常运行,电路部分在比赛中表现出很高的稳定性,无一次故障。 护甲采用弹性耐磨不锈钢作为反应装甲,不仅可以防护轮子受到攻击还可以利用弹性削弱攻击。 顶盖采用碳纤维板,在重量轻的同时保证了强度。

二、华北五省机器人 竞走机器人
1.成员:吴灿,刘涛
2 .作品简介:
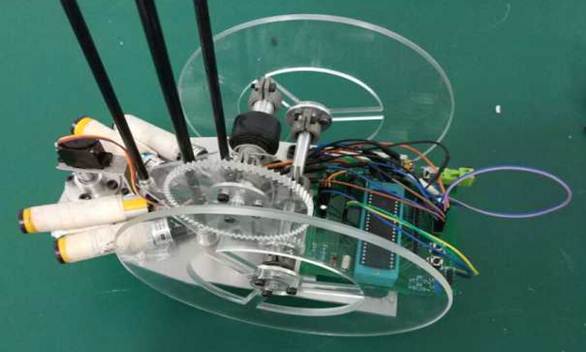
本款机器人身高27cm,总重1.7kg,有12个自由度。腿部拥有8个舵机,能够使双腿快速地行走。脚底板较大,不易摔倒。手臂4个舵机负重小但可以完成基本动作。本机器人机械方面最大的优点是机器人重量轻且重心低,机械结构适合走路。硬件方面,使用manshow,它是专为类人机器人设计的一款类人舵机主控板。循迹用8路红外激光HJ-TS-V1.1,后来用stm32主控控制蓝宙线性CCD。

三、2016省电赛 双智能小车
1.成员:1组:汤红镇、邹志发、张宏涛
2组:刘 涛、王崇杰、王强
3组:王晓斌、药云飞、沈轩
2 .作品简介:基于STM32F103单片机的双智能小车的设计与实现,小车完成的主要功能是:
(1) 设计制作A、B两辆智能小车,小车能按声音指令同时从起点出发(起点在上面一个菱形分叉处),往菱形上下两条边走。
(2)在上下两个菱形的汇合点前设限宽限高门,限宽限高门框架上设置红绿灯。两个红绿灯只能有一个为绿灯(允许通行),另一个是红灯。小车遇红灯必须停车,停车不能超过汇合点,且一旦停车必须停够3秒,车上亮起红灯,3秒后灭灯继续行驶。
(3)在下面一个菱形道路的分岔处,如果第一辆车从右边道路通过,第二辆车必须从左边通过,反之亦然。
(4)A、B两车到达终点的时间应该尽量短。在行驶过程中小车不能明显脱离跑道。
2.发挥部分
(1)在路外建立一个交通指挥中心,能实时模拟显示A、B 两车在道路上的位置。
(2)当两车在同一车道行驶时,后一辆车能保持和前车20厘米的安全距离(在弯道区设立限高限宽门进行测量)。

四、全国大学生工程训练大赛 无碳小车
1.成员:二队:吴灿、刘涛、王强
五队:王晓斌、张佳豪、马涛雨
七队:轩辕文成、付国强
2 .作品简介:
根据本次比赛要求,以实现小车爬坡,下坡,避障行走的目的,并且以实现小车平稳行走,绕过更多的障碍的前提。无碳小车应具备并且实现三大功能:一是实现重力势能转换为动能;二是实现爬坡;三是完美的绕过障碍。据此,我们将无碳小车的驱动机构和转向机构两大部分作为本次小车设计的核心。驱动机构为小车的动力部分,直接影响小车的行程是多少,为此,驱动机构要求能量利用率高,损耗小,传动平稳,传动比精确,优先选用齿轮机构;转向机构有舵机带动,由光电开电路板控制,配合光电开关传感器,实现高精度转向。
小车采用4个观点开关作为检测传感器,前面两个光电开关检测距离短,后面两个光点开关检测距离长,主要是后面两个光电来避障。具体思路是左边检测到往右转,右边检测到往左转,两个同时检测到和两个同时没有检测到都维持上一次的转向,只是变得方向小了点,前面的那两个光电开关主要用来左应急处理,如果小车因为某种偶然情况导致小车主体不能按照规定路线转过障碍,就会触发前面两个光电开关,来做较大的偏转。
五、2017国电赛
1.成员:邹志发、王强、闫彩清
2 .作品简介:
一、任务
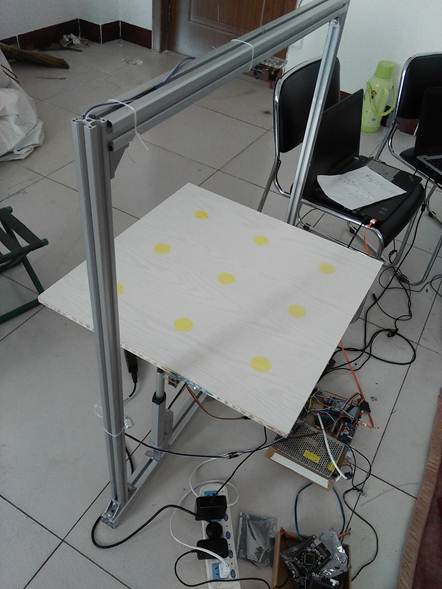
在边长为65cm光滑的正方形平板上均匀分布
着9个外径3cm的圆形区域,其编号分别为1~9
号,位置如图1所示。设计一控制系统,通过控制
平板的倾斜,使直径不大于2.5cm的小球能够按照
指定的要求在平板上完成各种动作,并从动作开始
计时并显示,单位为秒。
二、要求
1.基本部分 图1平板位置分布示意图
(1) 将小球放置在区域2,控制使小球在区域内停留不少于5秒。
(2) 在15秒内,控制小球从区域1进入区域5,在区域5停留不少于2秒。
(3) 控制小球从区域1进入区域4,在区域4停留不少于2秒;然后再进入区域5,
小球在区域5停留不少于2秒。完成以上两个动作总时间不超过20秒。
(4) 在30秒内,控制小球从区域1进入区域9,且在区域9停留不少于2秒。
2.发挥部分
(1) 在40秒内,控制小球从区域1出发,先后进入区域2、区域6,停止于区域
9,在区域9中停留时间不少于2秒。
(2) 在40秒内,控制小球从区域A出发、先后进入区域B、区域C,停止于区
域D;测试现场用键盘依次设置区域编号A、B、C、D,控制小球完成动作。
(3) 小球从区域4出发,作环绕区域5的运动(不进入),运动不少于3周后停止
于区域9,且保持不少于2秒。
 。
。
六、2015国电赛
1.成员:汤红镇、邹志发、张宏涛
2 .作品简介:
一、任务
一长约60cm~70cm的细管上端用万向节固定在支架上,下方悬挂一组(2~4只)直流风机,构成一风力摆,如图1所示。风力摆上安装一向下的激光笔,静止时,激光笔的下端距地面不超过20cm 。设计一测控系统,控制驱动各风机使风力摆按照一定规律运动,激光笔在地面画出要求的轨迹。
二、要求
1. 基本要求
(1) 从静止开始,15s 内控制风力摆做
类似自由摆运动,使激光笔稳定地
在地面画出一条长度不短于50cm 的直线段,其线性度偏差不大于±2.5cm ,并且具有较好的重复性;
(2) 从静止开始,15s 内完成幅度可控的摆动,画出长度在30~60cm间可设
置,长度偏差不大于±2.5cm 的直线段,并且具有较好的重复性; (3) 可设定摆动方向,风力摆从静止开始,15s 内按照设置的方向(角度)
摆动,画出不短于20cm 的直线段;
(4) 将风力摆拉起一定角度(30°~45°)放开,5s 内使风力摆制动达到静
止状态。